Physical AI with a Human Touch
We develop tactile sensing systems that give robots a sense of touch — enabling adaptable automation today and building the foundation for fully accessible automation tomorrow.
Trusted by more than 170 clients
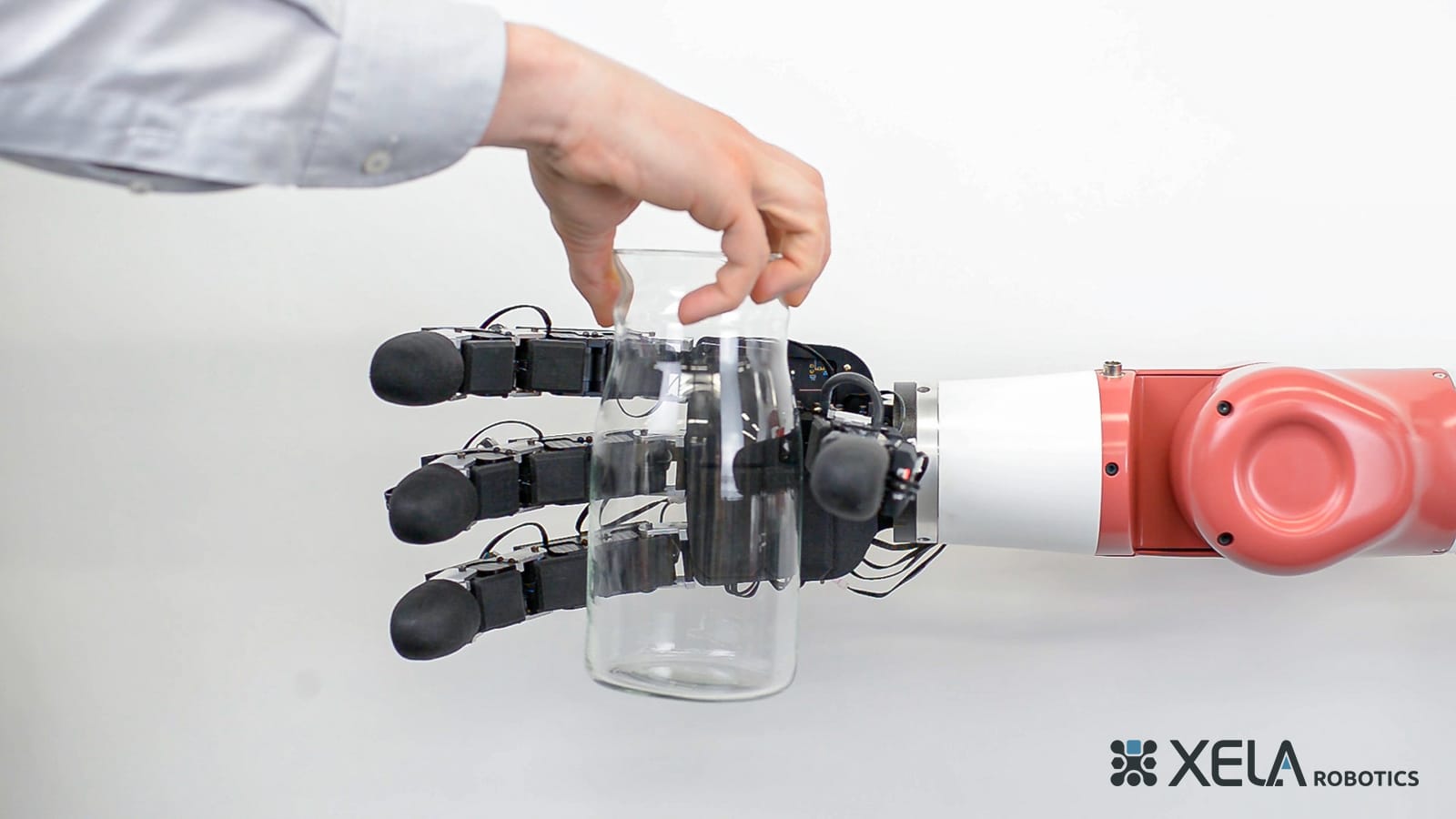
XELA’s tactile system combines
uSkin sensors and uAi software to help robots understand what they touch
Each uSkin sensing point measures pressure and shear forces. The data can be processed by uAi to visualize it, detect contact points, and record tactile data in real time.
Our systems can be used in automation, logistics, service robotics, and research.
Tactile data enables robots to handle fragile materials and perform with precision in uncertain environments.
-

XELA Robotics will participate in 3 exhibitions in May and June 2026
May 21, 2026XELA Robotics will showcase its latest tactile sensing innovations across three exhibitions in May and June 2026. The updates span new sensor hardware, software improvements and expanded integrations with leading robotic platforms, all on display through live demonstrations at our booths.
-

XELA Robotics Receives Further Strategic Backing from Existing Investor FSR Angel 1 LPS to Accelerate Global Expansion and Advance Hardware-Agnostic Robotics Platform
May 11, 2026XELA Robotics, a leading innovator in tactile sensing and robotics has received a new wave of strategic backing from its existing investor, FSR Angel 1 LPS (“FSR”), which is part of the FIVESTAR Capital Partners K.K. investment platform and managed by Rogers Investment Advisors K.K. This continued support underscores strong confidence in XELA Robotics’ technology…
-
Tactile Sensing in Industrial Domains: Why is ‘tactile sensing’ indispensable to the future of automation?
April 27, 2026Tactile sensing has significant untapped potential across industrial domains. Vision is essential for locating objects and planning gross motion, but it is rarely sufficient for grasping, holding, and manipulating objects reliably. Cameras cannot detect the slip of a component between fingertips, measure the force applied to a fragile surface, or sense the subtle deformation that…