XELA Robotics will participate in 3 exhibitions in May and June 2026

XELA Robotics will showcase its latest tactile sensing innovations across three exhibitions in May and June 2026. The updates span new sensor hardware, software improvements and expanded integrations with leading robotic platforms, all on display through live demonstrations at our booths.
- Robotics Summit & Expo 2026: May 27–28, Boston, Booth 616
- ICRA 2026: June 1–5, Vienna, Booth 107
- Automate 2026: June 22–25, Chicago, Booth 1888, South Hall. We are proud to be part of the Humanoid Robot Pavilion sponsored by NVIDIA.
New product unveilings and live demos
In addition to our usual product demos, we will unveil the following innovations:
- Robotic Fingertip with Nail: In an industry first, XELA Robotics has developed a robotic fingertip with a six-axis, force-sensitive nail, also including 30 tri-axial force sensing points distributed in the pulp. The robotic nail complements the tactile sensors in the fingertip to enable the dexterous grasping of extremely thin objects including thin cards and keys and the conducting of actions as complex as scraping tape off a surface.

Demonstration, in collaboration with Ogata Lab of Waseda University, shows how a sensitive robotic nail can pick up a playing card autonomously, as a learned skill, following a human demonstration. - uSkin integration in Universal Manipulation Interface: The open-source Universal Manipulation Interface (UMI gripper) enables AI for human-robot skill transfer by providing data collection from viewing humans doing everyday tasks – such as picking up a bottle of water and pouring it into a glass – and then transferring that skill to robot grippers. uSkin provides the ability to add distributed force-vector measurements to the data collection.

UMI gripper equipped with uSkin sensors in the fingertips, with real-time tactile data visualization. - Magnetic Interference Compensation: Shown for the first time at the Boston Robotics Summit & Expo in May, magnetic interference compensation removes even the most complex magnetic interference from nearby magnets or ferromagnetic materials – critical for the handling of iron and other metals in factories as well as for specialized parts including magnetic clips. It goes well beyond the prior add-on option which removed most magnetic interference other than for strong, small magnets nearly touching the sensors.
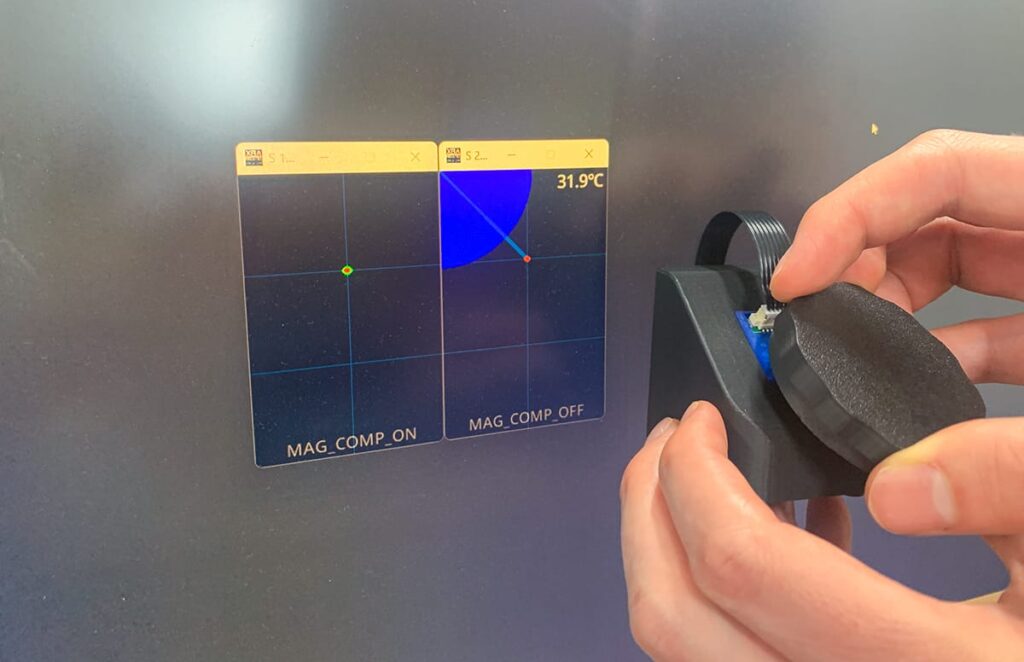
XELA Robotics’ enhanced magnetic interference compensation. A strong magnet (pull force of 3 kg) nearly touching the sensor has no effect on the compensated readings (left), while the uncompensated readings on the right show clear interference. - Enhanced Delicate Grasping Capability: uSkin tactile sensors now have a further improved capability to grasp and manipulate extremely fragile objects. This is a result of new software which includes machine vision to locate objects, provides better control of robot arms and an enhanced third-party graphic user interface all of which combine to enable the rapid and easy development of advanced robotic tasks. Visitors to XELA Robotics booth can participate in a cutting-edge pick-and-place demo involving a paper origami crane and a quail egg.
- High Durability Models: XELA has updated the fingertip covers it provides. In the case of damage, they can be easily replaced without the need to swap out the sensors or fingertips themselves. The updated covers enable even higher resilience and high force sensing albeit with lower sensitivity.
- Automatic Weight and Hardness Detection: Now, robots equipped with uSkin tactile sensors lifting objects can automatically determine their weight and hardness.
- Improved version of the uSPr DS: The uSPr enables all-around sensing and softness. Our latest version has reduced hysteresis in the measurements and was further reinforced without reducing sensitivity. All-around sensing with minimal hysteresis and high durability is beneficial in applications like bin-picking to avoid damaging surrounding objects.
- High-speed CAN FD communication: Our sensors now provide output via CAN FD (Controller Area Network Flexible Data-Rate), a modern high-speed communication protocol. CAN FD enables the use of more sensor modules on the same data line without a reduction in frequency due to increased data transfer rates (up to 8 Mbps) and larger payloads (frames can hold up to 64 bytes instead of the 8-byte limit in CAN). Together with our proprietary event-based communication, this ensures stable performance even when many sensing points are activated simultaneously. Minimal wiring, in general, is crucial for the integration of many sensors in limited spaces, such as a humanoid robot hand.
- Improved microcontrollers: Our improved microcontrollers enable higher frequencies; for example, the uSPr HE35 for the Robotiq Hand-E now operates at 500 Hz. The fingertips for the Hand-E have a thickness of only 6.6 mm, featuring 60 measurements in each fingertip and an easily exchangeable top layer.
Hardware-agnostic integration
Our uSkin technology is hardware-agnostic and can be integrated into a wide range of robot hands and grippers. At the show, we will be demonstrating this with the Tesollo and Allegro hands, as well as the Robotiq Hand-E and 2F grippers.
From standalone patch sensors and individual fingertips to full robot arm demonstrations, visitors will see firsthand how easily XELA technology integrates into complete robotic systems.
Share this article