



For Allegro Hand V4 Curved
by WONIK Robotics
Type: Robot Hand
Allegro Hand by WONIK Robotics.
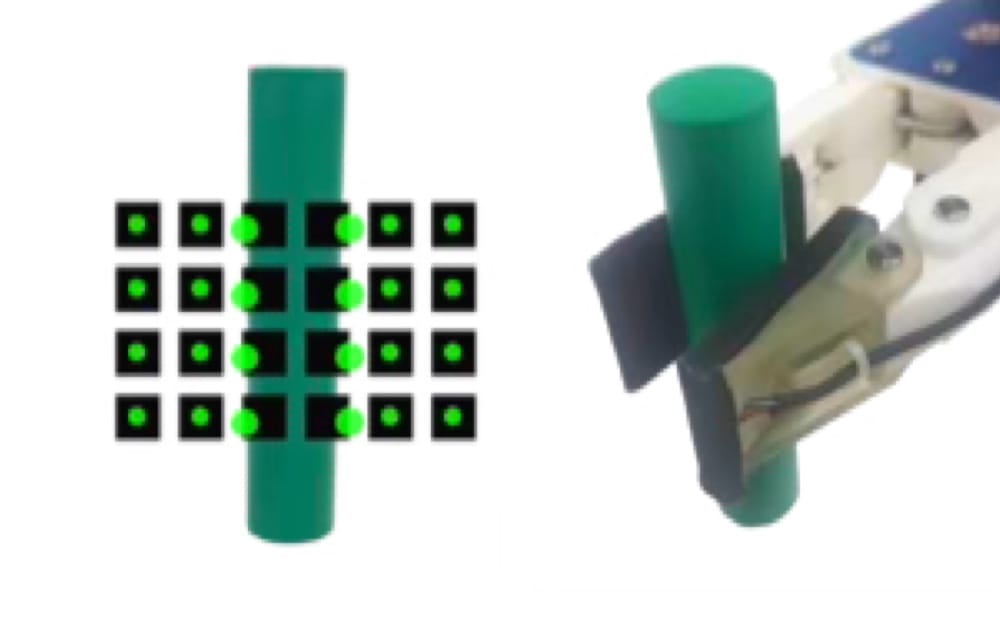
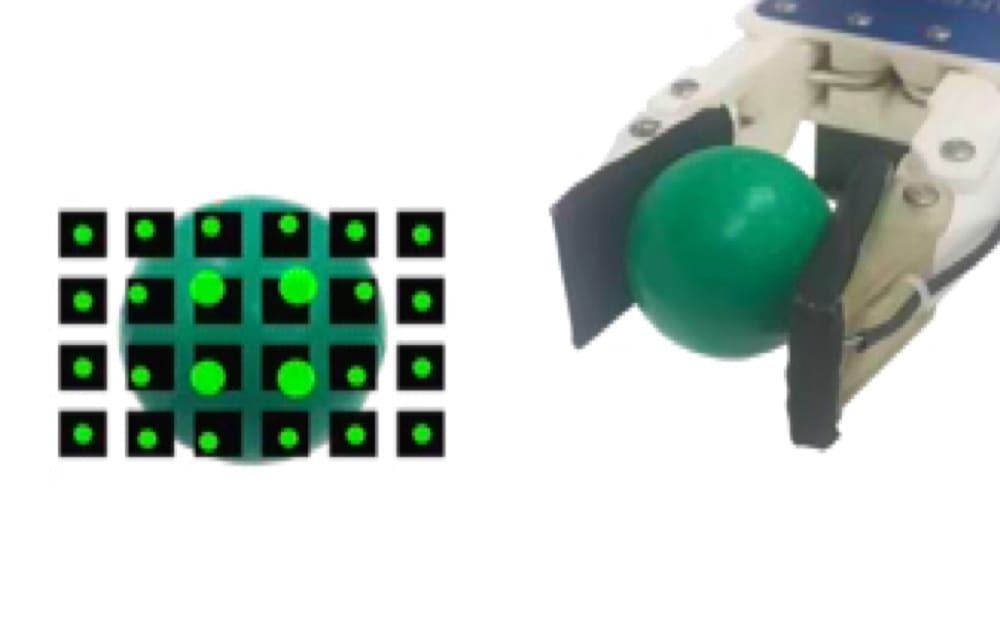
The curved design of the fingertips allows for a more natural interaction with the object and will provide you with a more detailed data collection. In addition, flat sensors are used to cover the other phalanges and the palm. All tactile information from the whole hand can be obtained with 70 Hz over just two cables (CAN bus). The soft skin enables gentle interaction with the environment, and this model features encapsulated microcontrollers for protection.
Price
Since our sensors are highly customisable and different for each individual application, the price varies.



Sensors connect directly to uAi Software for visualization, calibration, and compensation, providing consistent tactile data across diverse applications.
Compact Sensing Points



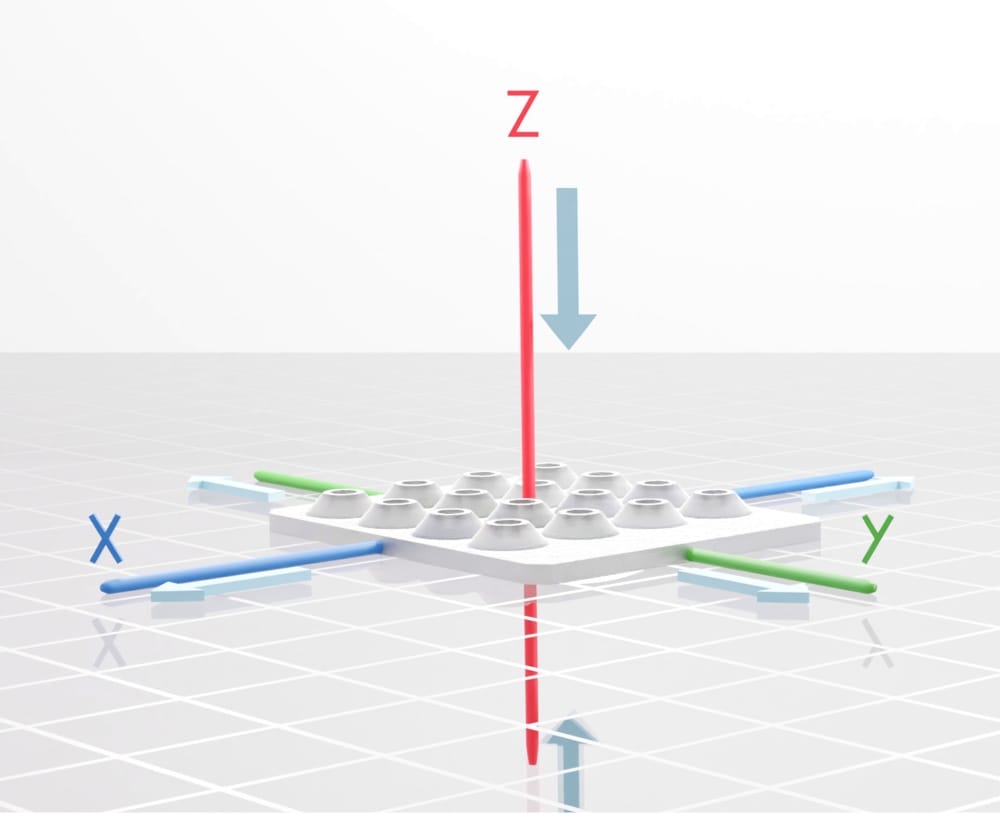
Distributed 3-axis Sensing
Sensitive: 0.1 gram-force Resolution

Soft & Robust
Minimal Wiring & Fast Sampling: 500 Hz
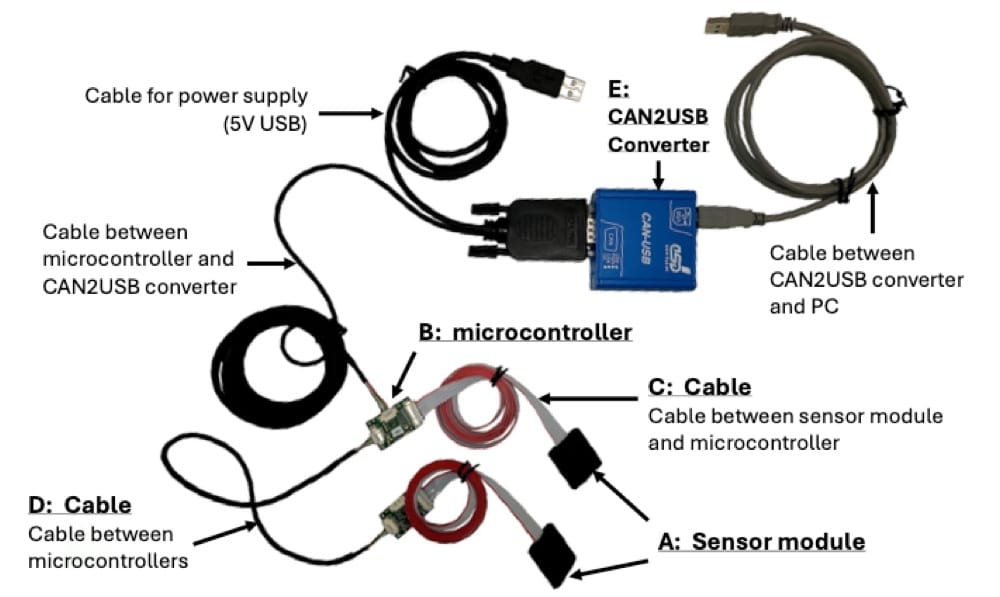
Easy to Integrate & Use
Calibrated to Newton
Temperature & Magnetic Compensation
Process, visualize, and analyze tactile data with uAi software
XELA’s software platform for processing tactile data from uSkin sensors.